+86-13073105066
admin@longshubearing.com







Prodotti





-

Cuscinetti per UAV
-

Cuscinetti per l'energia eolica
-

Cuscinetti di marca FAG
-

Cuscinetti automobilistici - Cuscinetti reggispinta frizione
-

Cuscinetti automobilistici: riparazione dei cuscinetti dello sterzo
-

Cuscinetti marca INA
-

Cuscinetti automobilistici-Cuscinetti del cambio
-

Cuscinetti automobilistici-Cuscinetti delle ruote
-
Cuscinetti elettricamente isolati
-
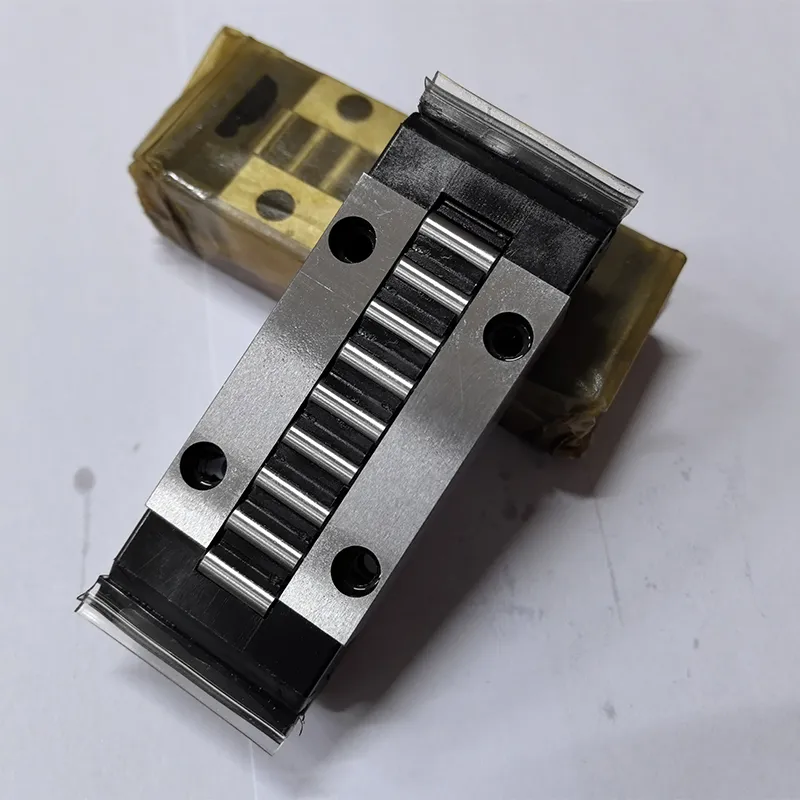
Cuscinetti per guide lineari
-

Cuscinetti per macchine agricole
-

Cuscinetti resistenti alla corrosione ad alta velocità
-

Cuscinetti del giacimento petrolifero
-

Cuscinetti personalizzati
-

Cuscinetti di marca SKF
-

Cuscinetti di marca NSK




















Cuscinetti per robot e manipolatori
I cuscinetti per robot sono componenti chiave dei robot industriali. Vengono utilizzati principalmente nei giunti manipolatori, nelle unità rotanti e nelle tavole rotanti di precisione. Le loro caratteristiche influiscono direttamente sul funzionamento regolare, sul posizionamento ripetibile e sull'affidabilità operativa del robot.
Descrizione
marcatore
Descrizione del prodotto
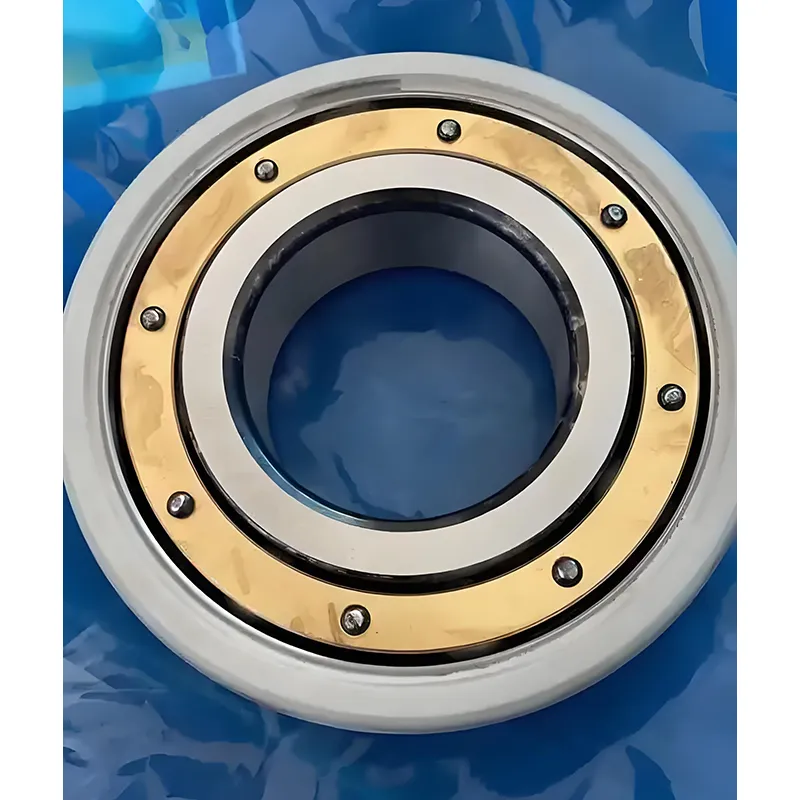
I cuscinetti per robot sono componenti chiave dei robot industriali. Vengono utilizzati principalmente nei giunti manipolatori, nelle unità rotanti e nelle tavole rotanti di precisione. Le loro caratteristiche influiscono direttamente sul funzionamento regolare, sul posizionamento ripetibile e sull'affidabilità operativa del robot. I tipi principali includono cuscinetti a rulli incrociati, cuscinetti a parete sottile, cuscinetti per ingranaggi ondulati e cuscinetti a strisciamento. Tra questi, i cuscinetti a rulli incrociati occupano una posizione di primo piano perché sono in grado di assorbire contemporaneamente carichi radiali e assiali, nonché momento ribaltante. Alcuni prodotti utilizzano tecnologie come le perle di ceramica al nitruro di silicio e i trattamenti superficiali di superfinitura per migliorare le prestazioni.
I cuscinetti per robot industriali sono principalmente suddivisi in cuscinetti uguali a parete sottile, cuscinetti a rulli incrociati, cuscinetti per ingranaggi ondulati, cuscinetti a strisciamento, cuscinetti per ingranaggi RV, nonché cuscinetti per motori elettrici e cuscinetti per viti di comando.
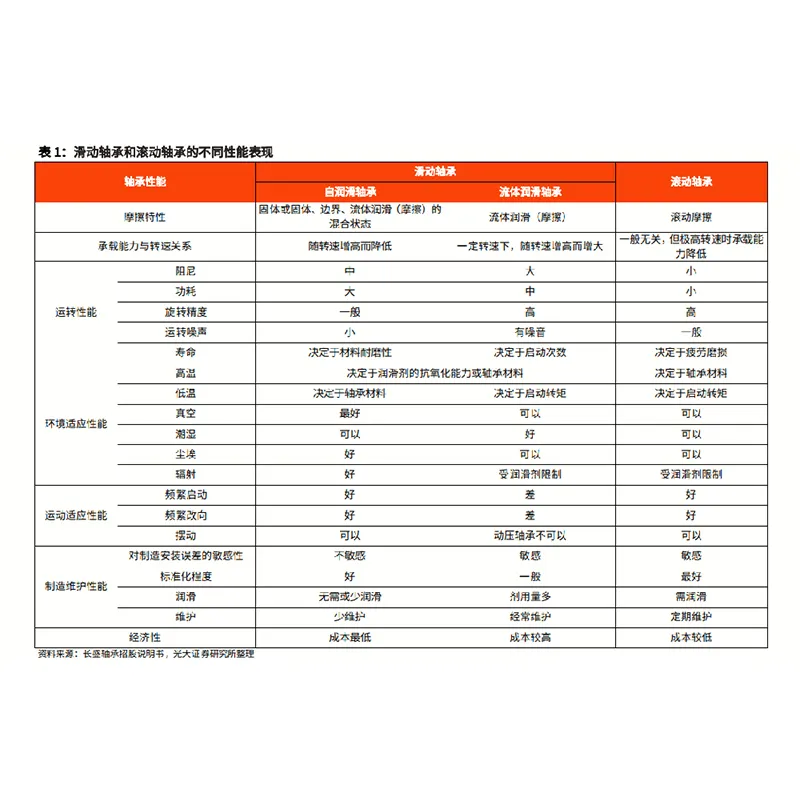
Tecnologia di progettazione
Il principio di progettazione dei cuscinetti che costituiscono componenti di robot industriali dovrebbe prevedere un'ottimizzazione multicriterio, in cui tre indicatori vengono presi come funzioni obiettivo: capacità di carico dinamico nominale, rigidità e momento di attrito. Le tecnologie chiave includono la teoria del contatto volvente, l'analisi del carico dinamico, l'analisi termica e la valutazione dell'affidabilità. La teoria del contatto volvente descrive le sollecitazioni da contatto e il comportamento deformativo delle superfici volventi, consentendo di prevedere la durata a fatica e la capacità di carico di un cuscinetto. L'analisi del carico dinamico modella le prestazioni di un cuscinetto in condizioni di carico dinamico. L'analisi termica consente di prevedere la distribuzione della temperatura e le sollecitazioni termiche nel cuscinetto, garantendone stabilità e affidabilità alle alte temperature. La valutazione dell'affidabilità basata su modelli probabilistici e analisi statistiche consente di prevedere e prevenire potenziali guasti.
Tecnologia produttiva e lavorazioni meccaniche di precisione
Le tecnologie chiave per la produzione di cuscinetti per robot includono: tecnologia per il controllo preciso del gioco negativo nei cuscinetti a pareti sottili; controllo dell'altezza di montaggio dei cuscinetti a sfere a contatto obliquo a pareti sottili; tecnologia per l'assemblaggio di cuscinetti a pareti sottili; tecnologia per la misurazione senza contatto dei diametri interno ed esterno degli anelli dei cuscinetti a pareti sottili. Tra i processi specifici rientrano anche: la tecnologia per la macinazione fine degli anelli dei cuscinetti basata sul controllo dello strato di incrudimento della lavorazione di macinazione; pressatura isostatica a caldo, che riduce del 60% le tensioni residue nel cuscinetto; indurimento in atmosfera controllata, garantendo il controllo della deformazione entro 0,02 mm.
")
")
")
")
contattaci
Prodotti popolari correlati
Cuscinetti automobilistici-Cuscinetti del cambio
I cuscinetti della trasmissione sono componenti meccanici chiave della trasmissione di un'automobile, progettati per supportare alberi rotanti e ridurre l'attrito. Se sono danneggiati, compaiono sintomi come rumore, aumento della temperatura e suoni estranei in folle, che richiedono riparazioni e sostituzioni tempestive.
Cuscinetti di marca SKF
I cuscinetti importati sono un concetto in contrasto con i cuscinetti di fabbricazione cinese. I cuscinetti importati non solo forniscono un forte supporto al marchio, concetti scientifici avanzati e innovazione, ma anche un perfetto servizio post-vendita e una forte espansione della gamma di prodotti.
Cuscinetti del giacimento petrolifero
Gamma di prodotti: cuscinetti radiali a sfere, cuscinetti a rulli cilindrici, cuscinetti orientabili a rulli, cuscinetti a rulli conici, cuscinetti assiali a rulli, cuscinetti a sfere a contatto obliquo, cuscinetti assiali a sfere, cuscinetti per apparecchiature petrolifere, cuscinetti per locomotive ferroviarie, cuscinetti per cambi, cuscinetti per pompe idrauliche, cuscinetti per ruote di camion di automobili, cuscinetti per laminatoi, cuscinetti in due metà, cuscinetti di precisione per macchine utensili, nonché una gamma di cuscinetti di precisione metrici e in pollici.
Cuscinetti personalizzati
È possibile realizzare cuscinetti di qualsiasi modello e dimensione in base alle esigenze del singolo cliente.

Cuscinetti per mountain bike
I cuscinetti per mountain bike sono uno dei componenti chiave che influenzano il comfort di guida. Di solito sono nascosti in componenti come boccole, carrelli e piantoni dello sterzo e, sebbene impercettibili, svolgono un'importante funzione nel ridurre l'attrito e garantire la rotazione regolare delle parti. Conoscere la tipologia dei cuscinetti, nonché la loro manutenzione e sostituzione, aiuta a mantenere la bicicletta in buone condizioni e ad allungarne la vita.
Cuscinetti resistenti alla corrosione ad alta velocità
I cuscinetti ad alta velocità sono cuscinetti volventi il cui valore Dmn supera 1,0×10⁶ mm·rpm. Le loro caratteristiche prestazionali sono determinate dal prodotto tra il diametro medio Dm e la velocità di rotazione dell'anello interno n; Sono progettati per applicazioni ad alta precisione e ad alta velocità.
Cuscinetti elettricamente isolati
I cuscinetti isolati elettricamente utilizzano uno speciale processo di spruzzatura per applicare un rivestimento di alta qualità sulla superficie esterna del cuscinetto.

Cuscinetti in acciaio inossidabile
Rispetto ai cuscinetti convenzionali, i cuscinetti in acciaio inossidabile presentano evidenti vantaggi non solo in termini di materiale, ma anche in termini di tecnologia e controllo di precisione: i requisiti per loro sono molto più severi rispetto ai cuscinetti convenzionali. Durante il funzionamento, i cuscinetti in acciaio inossidabile funzionano in modo stabile, sono silenziosi, resistenti alla corrosione e sono ampiamente utilizzati.

Cuscinetti per laminatoi metallurgici
I cuscinetti a rulli sono un altro nome per i cuscinetti dei laminatoi metallurgici. Sono componenti chiave progettati per supportare i rulli del laminatoio e mantenerli nella posizione corretta nella gabbia. I cuscinetti a rulli sono principalmente suddivisi in cuscinetti a strisciamento e cuscinetti volventi e devono avere caratteristiche di basso attrito, elevata resistenza e rigidità moderata.

Cuscinetti in ceramica con sfere in nitruro di silicio
I cuscinetti a sfere in ceramica sono cuscinetti industriali in cui gli elementi volventi sono materiali ceramici. Di solito utilizzano un design combinato di sfere in ceramica (nitruro di silicio Si₃N₄ pressato a caldo o biossido di zirconio) e anelli metallici.
Cuscinetti per l'energia eolica
I cuscinetti eolici sono componenti chiave degli impianti eolici. In base alla loro posizione e funzione in un generatore eolico, sono principalmente suddivisi in cuscinetti di imbardata, cuscinetti di beccheggio, cuscinetti dell'albero principale, cuscinetti del cambio e cuscinetti del generatore.
Cuscinetti per UAV
I cuscinetti utilizzati nei veicoli aerei senza equipaggio devono soddisfare i requisiti di leggerezza, elevata velocità di rotazione, basso attrito e resistenza alla corrosione.
Cuscinetti marca INA
I cuscinetti importati sono un concetto in contrasto con i cuscinetti di fabbricazione cinese. I cuscinetti importati non solo forniscono un forte supporto al marchio, concetti scientifici avanzati e innovazione, ma anche un perfetto servizio post-vendita e una forte espansione della gamma di prodotti.
Cuscinetti per macchine agricole
I cuscinetti per macchine agricole sono i componenti di base più importanti delle macchine agricole e sono ampiamente utilizzati in trattori, presse per balle, mietitrebbie e altri tipi di macchine agricole. La precisione, le prestazioni, la durata e l'affidabilità dei cuscinetti agricoli svolgono un ruolo fondamentale nelle macchine agricole.
Cuscinetti di marca FAG
I cuscinetti importati sono un concetto in contrasto con i cuscinetti di fabbricazione cinese. I cuscinetti importati non solo forniscono un forte supporto al marchio, concetti scientifici avanzati e innovazione, ma anche un perfetto servizio post-vendita e una forte espansione della gamma di prodotti.
Cuscinetti automobilistici - Cuscinetti reggispinta frizione
Il cuscinetto di rilascio della frizione di un'auto è un componente chiave della trasmissione di un'auto. Viene installato tra la frizione e la trasmissione e, coordinando i movimenti rotatori e assiali delle leve di rilascio, garantisce un innesto e un disinnesto fluidi della frizione, riduce l'usura e prolunga la durata della trasmissione.