+86-13073105066
admin@longshubearing.com







Azionamento rotativo per robot umanoidi: piccolo cuscinetto - grande ruolo!
2026-05-08
Se confronti un robot umanoide con un ballerino energico, l'attuatore rotante è il "motore" delle sue articolazioni, che alimenta ogni movimento aggraziato. L'attuatore rotante, che è un componente chiave di un robot umanoide, è composto principalmente da un motore elettrico, un cambio, sensori e un controller. Il suo principio di funzionamento è convertire l'energia elettrica in energia meccanica: il motore elettrico produce energia, il cambio regola la coppia e la velocità di rotazione, i sensori monitorano lo stato del movimento in tempo reale e il controller controlla accuratamente la direzione, la velocità e la posizione del movimento in base a un programma predeterminato.

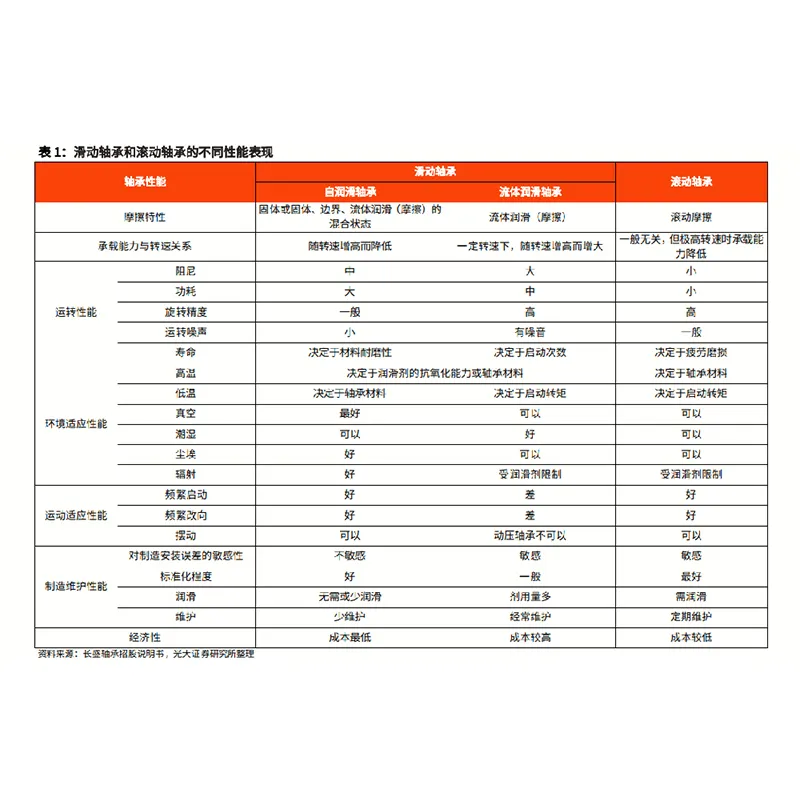
Cuscinetti: il “supporto invisibile” degli azionamenti rotanti

In un sistema complesso e preciso come un azionamento rotativo, i cuscinetti svolgono un ruolo chiave come “supporto invisibile”: sebbene siano spesso nascosti all’interno dell’apparecchiatura e difficili da vedere, hanno un impatto critico sulle prestazioni dell’azionamento rotativo.
In termini di funzione di base, il compito principale dei cuscinetti è quello di supportare le parti rotanti, garantendo stabilità durante la rotazione dell'albero motore, degli alberi di ingresso e di uscita del cambio, ecc. Prendiamo come esempio un motore convenzionale. Durante il funzionamento a velocità elevate, il rotore del motore crea una forza centrifuga e vibrazioni significative. Senza supporto sotto forma di cuscinetto di alta qualità, il rotore inizierà a vibrare, il che porterà a un funzionamento instabile del motore e potrebbe persino causare guasti al motore. Il cuscinetto funge da forte "base", fissando saldamente il rotore e consentendogli di mantenere la posizione esatta dell'asse ad alte velocità, garantendo così il normale funzionamento del motore.
In termini di riduzione dell’attrito, il ruolo dei cuscinetti è insostituibile. Quando le parti rotanti della trasmissione sono sottoposte a movimento relativo, l'attrito provoca perdita di energia, calore e usura, che incidono gravemente sull'efficienza e sulla durata dell'attrezzatura. Grazie alla loro struttura speciale, come l'attrito volvente tra gli elementi volventi (sfere, rulli, ecc.) e le piste, i cuscinetti riducono notevolmente il coefficiente di attrito. Rispetto all'attrito radente diretto, le perdite di energia durante l'attrito volvente possono essere ridotte più volte o addirittura decine di volte. Ciò non solo migliora l'efficienza di conversione energetica dell'azionamento rotante e riduce il consumo di energia, ma riduce anche l'usura delle parti, prolungando la durata dell'apparecchiatura.
I cuscinetti hanno un'influenza decisiva sulla precisione e sulla stabilità di un azionamento rotante. Quando un robot umanoide esegue operazioni di alta precisione, come la raccolta di piccoli oggetti o l'assemblaggio di precisione, la precisione del movimento dell'attuatore rotante determina direttamente il successo dell'operazione. I cuscinetti ad alta precisione mantengono la rotazione e la deflessione delle parti rotanti entro limiti estremamente ristretti, garantendo precisione e movimento privo di errori trasmessi dall'azionamento. Allo stesso tempo, la rigidità e la capacità di carico dei cuscinetti garantiscono un funzionamento stabile dell'azionamento quando esposto a varie forze e momenti esterni. Se i cuscinetti non sono sufficientemente precisi o hanno una bassa rigidità, il robot andrà incontro a problemi quali vibrazioni e deflessioni durante il movimento, impedendogli di eseguire compiti che richiedono elevata precisione.